相信对于学习过单片机编程的朋友来说,对于市面上其他可编程小型机器人都不会陌生,而如今的编程机器人已经逐渐向小学生靠拢,编程过程也没有了以往枯燥的代码,其中大多数编程机器人爱好者最为喜欢Arduion开发板,因为它是一款简单的模块,但是却可以实现最简单的编程动作,因为其兼容性高,可以通过搭载其他模块来实现多种功能,所以成为很多基础编程朋友的必修课,再加上现在的Scratch的发展,复杂的编程语言已经变得更加简单,积木式模块组合式的编程只要稍微的思考一下,即可编出较为复杂的程序,而目前市场上出现的其他种类的编程机器人,大多数也是基于对于Arduino UNO的开发,结合Scratch的使用,从而可以设计出编程较为简单的机器人,其中kittenbot就是其中的一种。

开箱篇:
Kittenbot的外包装采用天地盖盒式包装,内则采用黑色海绵体作为保护。


我们先来看看它的主要零部件—Rosbot主板,这是整个机器人的核心部件,它和配套的铜柱和螺母放在同一个静电袋里面封装,整个电路板是基于Arduino UNO的开发,集成度较高,焊点较为饱满。




因为集成了其他模块,所以的它的拓展范围较广,基本上可以连接市面上绝大多数产品模块,所以使用起来也更加方便,例如里面加入的2个双H桥,无需其他驱动模块既可插入电机使用,最大可以驱动4个直流小电机或者2个4线步进电机,要知道其他Arduion主板可是要另外搭载驱动模块来驱动电机的。

而且据介绍它的设计可以支持升级搭载树莓派2、树莓派3B+和Intel UP Board单板计算机,组合使用后可以直接使用ROS机器人系统,是升级必备产品。
和Arduion UNO主板类似,Rosbot主板也同样采用的Atmel mega 328P芯片,只不过采用的功耗更低的贴片类型。

同时主板上也带有常见的USB接口,采用的ch340G USB转接串口芯片,所以主板可以直接通过usb数据线连接电脑使用,基本上Arduion UNO有的它都具备了,其实就是升级版的Arduion UNO主板。

而配套的还有块ESP8266 wiff模块,也是kittenbot根据ESP8266自己开发升级的,也是升级版ESP8266,采用完全自主开发的固件,具有便捷的网页配置界面,可以自定义波特率、模块名字、查找和连入路由器等等。

因为wifi模块可以提供串口和UDP的透传通信,可以让机器人具有无线通信功能,所以通过KittenbotApp可以让wifi模块一键接入路由器,操控更简单。
而其kittenbot里面配套有三组特别的马达,一个是TT直流电机,这种马达运动速度较快,但是运动精度不高,不能精确控制。

还有一组马达是步进电机,这种马达精度较高,可以精确控制速度和距离,运动较慢,类似打印机里面就采用的步进电机,所以打印才能非常准确,送来的步进电机采用静电袋封装,看起来非常高档。



以上的电机基本就是机器人的脚,虽然是脚,kittenbot却准备了两种不同电机,可以让我们使用者感受到不同种类的区别和使用方式,使我们更加深层次的了解机器人的各种构造。
而里面第三种电机则是9g的舵机,和步进电机一样可以准确的调节速度角度,不过可供使用和调节的角度只有180度大小,主要使用在机器人的头部,属于机器人的脖子,可以精确控制却无需360度的旋转,因为它要配套轴连接器使用,所以里面用包装袋将电机和轴连接器包装在一起,并且配备了三种不同的连接器类型。



里面还配套了机器人的眼睛 — 超声波模块,这个模块采用铝塑封装,一个眼睛发射40KHz频率声波,而另一个眼睛则用来接收这些声波,并通过计算声波传播的时间来计算距离。


而配套在kittenbot上用于连接9g舵机和超声波传感器桥接器也与众不同,它具有额外的VCC / GND端口和电子模块的输入引脚的功能,可以接入如NeoPixel Ring,环穿过超声波传感器安装上LED环形灯,它就变成了机器人的眼睛。


而为了丰富使用机器人的各种功能,里面还送了红按钮、蓝按钮、蜂鸣器、LED环形灯这些感应和响应的模块,我们可以充分的体验各种模块的乐趣,可以说kittenbot是一款功能较为丰富的机器人。



组装篇:
因为机器人功能结构基本大同小异,所以我们先来组装一个最为简单的机器人作为例子讲解。
我们安装先从TT直流马达开始,一般只要对准马达上的突起和铝合金上面的孔,基本上就可以卡紧了,只要上M3X30的螺丝和螺母既可固定。


然后装上47mm直径的橡胶轮胎,轮胎上的轴连接器上的孔其实有大小之分,它对应步进电机和TT直流电机上的轴,所以看清楚再插。


然后在前后装上万向轮。

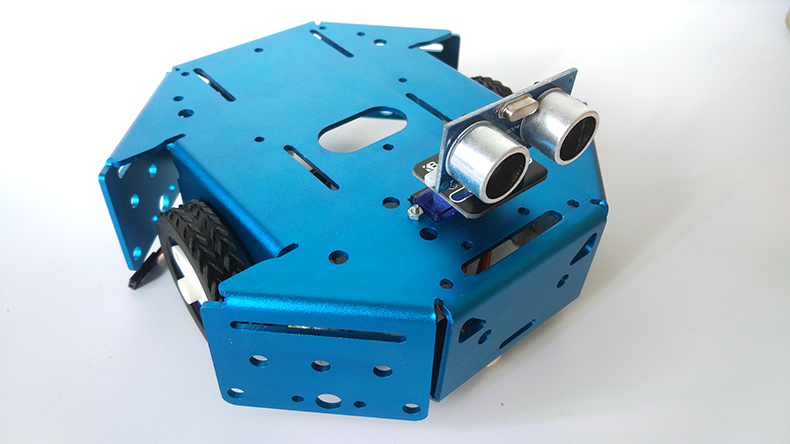
关于舵机,则在铝合金底盘上找到舵机小孔,安装上即可。


对于超声波连接,只要超声波模块和超声波桥接器对准标识插孔插入即可。

然后用舵机轴连接器装上,最后安装在舵机轴上,用小螺丝拧紧。


最后就到组装主板部分,非常建议大家主板最后装,因为无论前面的硬件怎么装,都不容易损坏,先装主板容易在其他硬件组装过程损坏主板,所以重要的事情说三遍。
首先将主板用配套的螺柱装上,喜欢的可用使用里面的六角螺丝安装。


然后对准底盘上的两条长沟装上,当然,可以的话装在底盘底部也是可以的,如果装在上部,建议安装的沟槽留一点空隙,可以放进红色扎绳带的宽度,这样就可以在以后捆绑电池盒,然后就是主板前面和超声波模块之间也留下一点空隙,避免舵机旋转过程撞到主板。


最后将各个电线通过底盘中间的小口穿出,再将插口插进相应的位置,电池盒则直接在底盘下面用红色扎绳带捆紧,喜欢的也可以直接装上WIFI模块,具体的来一张照片,或者参考说明书。


整个制作过程就十几分钟,非常简单,看起来萌萌的。

使用篇:
对于wifi连接,在插入wifi模块的主板上插上电源或者直接通过电脑插入USB接口,都可以正常启动主板,并且插上的wifi模块会自动发射wifi信号,支持wifi连接的设备都可以接入,接入后直接进入192.168.4.1即可进入主页,因为发现固件是旧版的,所以自己升级了一下。

先将主板上的靠近USB接口的Tx、Rx接口跳线帽拔出,然后用杜邦线接到对应的wifi模块脚上(看清了接,Tx接Tx脚,Rx、接Rx脚),然后在排针上接上电源,也就是黑色和红色部分,不要接黄色,同样对应着脚来接,黑色排针是接地的。




将ESP8266上面的开关拨到特殊开启状态位置,也就是下图拨动开关到左边。

在更新之前先到官网论坛下载ch340驱动和ESP8266固件更新软件,然后先安装驱动,再通过USB数据线连接上主板和电脑,等驱动自己安装成功,然后再开启更新软件更新。

这时候进去就可以看到全新界面形式,比之前的界面详细了很多,可惜的是界面采用的英文。

重新装上WIFI模块,将wifi模块开关打回普通模式,然后接上电源,就可以给机器人编程了,对于编程机器人部分,无论是USB数据线接入还是无线接入都可以,最方便的还是直接无线接入。
对于无线接入,目前此款机器人比较有趣的一点是可以支持手机App连接,在里面可以设置机器人对路由器的连接,并且可以支持最简单的遥控连接控制,非常有意思。



当然主体的使用还是电脑为主,要编程先到kittenbot论坛下载kittenBlock软件(再三告诫,必须去kittenbot论坛下载,主页里面的软件只支持英文,而且版本较为老旧,功能简单。),进去软件里面先将语言设置为中文,并且更新成最新版本,因为是基于Scratch3.0软件开发的,所以里面的功能采用积木式图形模块编程,并且可以和里面的精灵进行互动编程,非常简单有趣。
可以看到里面的界面左边是控制模块,中间是编程区域,右边则是舞台精灵和arduion IDE部分。

这款软件目前最新版本升级可支持多种不同种类的机器人编程,左上角页面上可以看到,现在市面上的BMbot也可以使用此款软件。

在使用操作前先将机器人和软件连接起来,因为我采用的是无线连接,所以机器人接上电源后,可以先用手机或者电脑连接机器人的wifi,输入192.168.4.1进入机器人页面,在wifi station页面里面设置连接上家庭的路由器即可,或者最简单的,使用电脑直接连接上机器人wifi即可直接操作。

先在左上角连接处找到带有IP地址的wifi模块端口,然后点击连接,当然用USB的话就看一下com端口,插拔一下USB数据线,消失的那个就是了。

然后在点击右边Arduino的选项,切换里面页面到Arduino IDE界面,一般连接成功都会在右下角的黑色框内提示固件版本号,没有出现则可以在右下角输入框内输入M0查看一下,再没有出现版本号就得检测是不是不没有连接好或者驱动没有装好,检查多次(不过有时候已经连接正常,只要在里面重新下载固件更新就可以正常显示)。

如果连接成功就点击恢复出厂固件,再点击上传,将主板固件升级到最新,目前主板固件是V2.1版本。
前面都搞定了就可以编程操作了,这部分基本上和其他采用的Scratch软件编程机器人使用一样,只要编程过程中将里面的模块引脚标示清楚,逻辑顺序正确,基本上经过软件编译上传后,机器人就可以离线操作了,这些都网上可以搜出一堆,所以就不介绍了。

不过还是得提示一下使用问题,比如这款机器人最好是选择使用18650锂离子电池,毕竟比较耗电,像我直接使用的充电宝,当然得选择的是充电宝输出电流接口至少得2A那种的,而且在各大论坛里面的编程操作过程中,我发现对于舵机的使用,调节角度只能是0到180度之间,并不能和官网介绍与及其他论坛大神的编程一致,也许是更新固件后的问题吧,只要调节角度设置小于零,无论负多少都会直接跑到舵机右边的尽头,只有0到180度选择,它才会老老实实的工作,还有就是直流马达的安装,螺丝不能拧的太紧,否则里面的传动齿轮会容易卡住。
基本上这款机器人套装已经将市面上绝大多数的常见配件模块都囊括了,而且编程软件里面也基本上都有针对特定模块开发出来的组件,所以编程过程没有了以往的复杂的数据设置,加上主板集成度高,添加模块过程简单便捷,这样的使用设计更加方便初学者了解机器人构造,并对各种硬件类产品也可以有更深层次的了解,所以这样一款看似简单,但是功能复杂的产品,还是非常适合初学者使用的。
总结:
优点:配套齐全,基本上市面上常用小型机器人的模块都有了,而且设计结构精巧简单,编程也较为简单方便,适合初学者学习使用,而且机器人搭载上wifi模块可以直接实现无线烧录,大大方便了使用连接方式,因为主板集成度高,接口丰富,所以可以适配市面上绝大多数模块,使用丰富度高,可扩展力较强。
缺点:使用说明书较为简单,对于部分硬件使用无参照可寻,可供使用危险提示不多,初学者对于某些接口认识不足容易出错,电池的挂载设计有问题,没有固定的方便形式挂载,wifi模块不知道是不是更新固件后的原因,有时候会突然间消失信号,需要重启几次才有,编程过程,发现点击开启全局事件运行的时候,经常会出现点击暂停按钮无效的情况,而编程中如果没有加入对直流电机的使用,但是开启全局测试的时候经常会出现直流电机自己开启的情况,再有就是可供参考的编程文件较少。
建议:电池盒挂载设计希望可以方便一点装取电池,希望是安装比较稳定的方式,可以的话建议设计成可以安装充电宝的插座或者统一安装可充电聚合物电池,wifi模块希望做到可以长时间稳定输出信号,解决kittenblock里面编程和机器的执行问题,使得操控更准确和简单。

评论列表(已有条评论)
最新评论