月球将成为“机械猿猴”的殖民地,上演真实版的“人猿星球”。德国人工智能研究中心(DFKI)和不莱梅大学的科学家最新研制一款太空机器人,能够像猿猴一样行走和攀爬,适合在月球崎岖表面上探索。

“机械猿猴”名叫“iStruct Demonstrator”,重量为18公斤,其铰接式脊柱连接至躯干和盆骨,以及足部和脚踝,它的“关节”装配着传感器,能够监控环境表面的变化。
德国人工智能研究中心的工程师现已研制一款机器人,其行走和攀爬方式非常类似于猿猴,目前研究人员计划派遣该机器人对月球进行勘测探索。
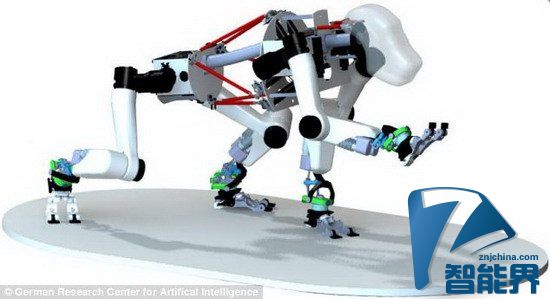
这款太空机器人被命名为“iStruct Demonstrator”,它具有机械手臂、腿部和脊椎,能够模拟灵长目动物的行为,它将取代当前月球勘测任务中的滚轮式探测器。
这支研究小组已建造一个猿猴机器人,并在人工智能研究中心模拟月球基地进行了测试,据称,这款机器人的四足结构站立时非常稳定,可以越过障碍物或者小山丘,非常适合于月球表面勘测任务。同时,当这款机器人跌倒时能够重新站立起来。
此外,这款猿猴机器人能够后腿直立站起来,使用手臂采集样本,或者超过前方障碍物。它的重量达到18公斤,尺寸大小为66×43×75厘米。
观察响应地面结构的变化。基于不同类型的电动机,这款机器人能够转动26度。
“iStruct Demonstrator”非常类似于美国国防部高级研究署机器人挑战大赛中设计的“猩猩机器人”,然而,德国科学家最新研制的这款机器人具有链接式脊柱,其工作方式如同一个6轴扭矩传感器,它的设计非常独特,有助于实现四足协调移动。
安装在足部和脚踝的传感器能够维持其勘测倾斜表面时的身体平衡性,人工智能研
究中心一项研究指出,“iStruct”项目将有效提高机器人系统的运动性和机动性。
这个研究项目主要聚焦于实现可移动机器人的智能化结构,从而增强复杂行走机器人的有效性。大量的传感器能够提供精确的环境洞察力,因此这款机器人将需要大量局部性预处理和评估的数据流。
2009年,该项目负责人丹尼尔-库恩(Daniel Kühn)曾设计类似的一款机器人,叫做“小猿猴”,它具有类似的四足行走能力,据悉,“iStruct Demonstrator”将于今年8月份设计完成。
智能界(www.znjchina.com)是中国首家专注于报道智能科技前沿的综合垂直媒体,秉承“引领未来智能生活”的理念,持续关注智能家居、可穿戴设备、智能医疗、机器人、3D打印、智驾等诸多科技前沿领域,提供最前沿、最时尚、最实用、最专业的硬件产品介绍、硬件评测、服务定制、最新资讯、圈子交流等服务,致力于成为最具价值的智能科技信息互动平台。
智能界【微信公众号ID:znjchina】【新浪/腾讯微博:@智能界】

评论列表(已有条评论)
最新评论